Reference: Xu, N.W. and Dabiri, J.O., 2020. Low-power microelectronics embedded in live jellyfish enhance propulsion. Science Advances, 6(5), p.eaaz3194.
DOI: 10.1126/sciadv.aaz3194
Why study biohybrids?
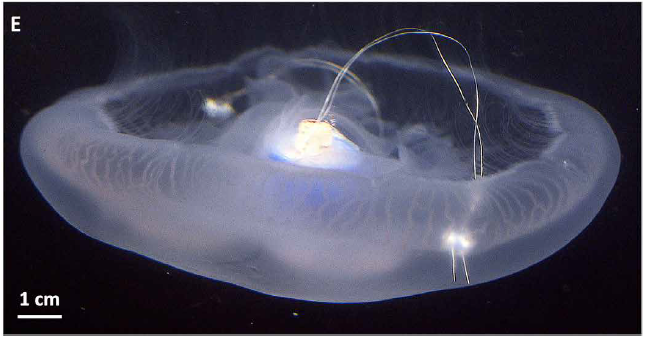
A majority of the world’s oceans are beyond reach of traditional sampling methods. Because of this, a lot of recent research involves developing and improving remotely operated vehicles and sensors. Some Autonomous Underwater Vehicles (AUV) can be used to sample and control remotely, but these instruments require expensive upkeep and have high energy demands. Some labs have started developing bioinspired robots that use biological knowledge and even biological tissue to make robots, such as the Robojelly and Jennifish. One lab even used rat cells to develop a robot similar to a ray. Although the energy costs of these bioinspired robots are lower than those of their purely robotic counterparts, their swimming speeds are much slower. In order to develop a tool with faster swimming speeds and lower energy requirements, Xu et al. (2020) conducted a study to develop a ‘biohybrid’. They used the natural mechanics and propulsion of a jellyfish (Aurelia aurita) with a controlling mechanism to create a ‘biohybrid’ organism. A ‘biohybrid’ includes categories of robots that use a combination of organisms and robotics.
How well do these biohybrids work?
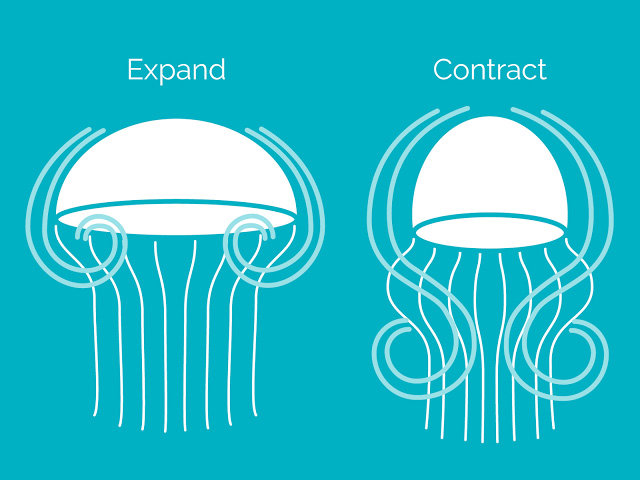
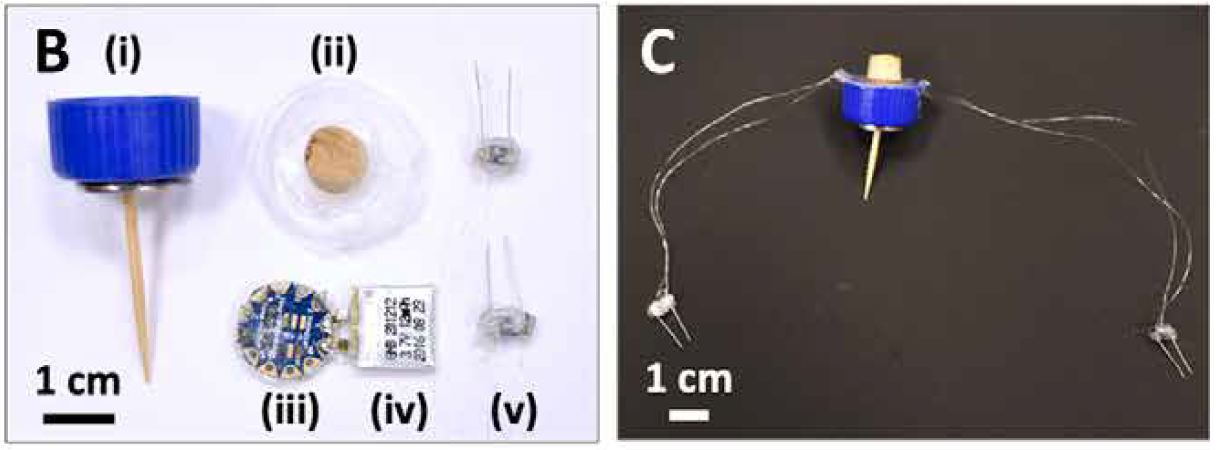
The biohybrid jellyfish works with a pulse of electricity from a controller to a set of electrodes that stimulate contraction of the jellyfish’s bell and propel it forward. Pulses were then given at varying frequencies (from 0.25 Hz to 1.00 Hz) and compared to a control organism with a controller inserted but with no electrical pulses (video of experiment). Jellyfish move by contracting a muscle ring at the edge of the jellyfish bell that results in propulsion forward, after which the bell expands and the underside of the bell fills with water before once again contracting and moving forward. The authors found speed increased with frequency of pulses up to ~ 1.00 Hz. At this frequency, the bell of the jellyfish was unable to completely expand before contraction and resulted in decreased speed.
Additionally, during these experiments the metabolic rate, or rate of consumption of oxygen, was measured. This study was the first to directly measure oxygen consumption in jellyfish and give an estimate of energy consumption. Finally, compared to other robotic instruments with similar capabilities, this biohybrid is 10-1000 times more energy efficient. In fact, the only energy required to move the robot is from the 10 mA battery attached to the mini-processor. Therefore, this technology could significantly expand the capabilities of autonomous robotic instruments.
Ethical considerations and future directions
Although Jellyfish are invertebrates without a central nervous system, many precautions were taken to prevent tissue damage in the Jellyfish. Original application of the control was an adhesive strip on the outside of the jellyfish; however, this could only be applied on dry surfaces. The final design included a wooden peg that was inserted into the jellyfish but caused minimal damage from which the tissue was repaired after 1-2 days. Although the damage to the jellyfish in this experiment was minimal, the efficacy of using a living organism for ocean monitoring efforts would have to be discussed. This study was the first to demonstrate how biohybrids might be effective in the world’s oceans to take measurements similar to that of an AUV. This study was also the first to measure metabolism of these organisms using oxygen consumption over time. Future studies are needed to investigate maneuverability with these organisms without causing harm to the animal.


Podcast: Play in new window | Download
I’m a PhD student in the Rynearson Lab at the University of Rhode Island (URI) Graduate School of Oceanography (GSO). My research interests are focused on human impacts on the oceanic ecosystem, particularly effects on the primary producers (phytoplankton) at the base of the food web. Currently, I work with cultures from regions of the ocean that are nutrient limited and will conduct experiments to investigate how these phytoplankton survive.
Very interesting, thank you. Is there any interest in using organisms other than jellies, or do jellies have a special advantage? How much equipment is actually used for data collection – is it feasible to add this kind of monitoring technology to, say, biotagging efforts on marine mammals and turtles?
Jellyfish were easier to manipulate with the technology used than other organisms, so likely it can’t be used for marine mammals and turtles. I don’t they’ve added data collection equipment yet, but some of the technology to do this is quite small (~4-5 cm). Thank you for the interest!