
Background:
Imagine if you could function just as well at the top of Mt. Everest (where the air is super thin) as you do at sea level; you’d probably be considered pretty special. Well, nautiluses (Figure 1) can do that, except they do it in the water at depths where there are low supplies of dissolved oxygen.

During the day, nautiluses either rest around 600 ft. or forage around 2100 ft., whereas at night, they continuously travel between the two depths. Moving up and down through the water column is a challenge because of variable oxygen conditions. In the deeper depths where the nautiluses forage, the oxygen availability is low (hypoxic) relative to the shallow depths.
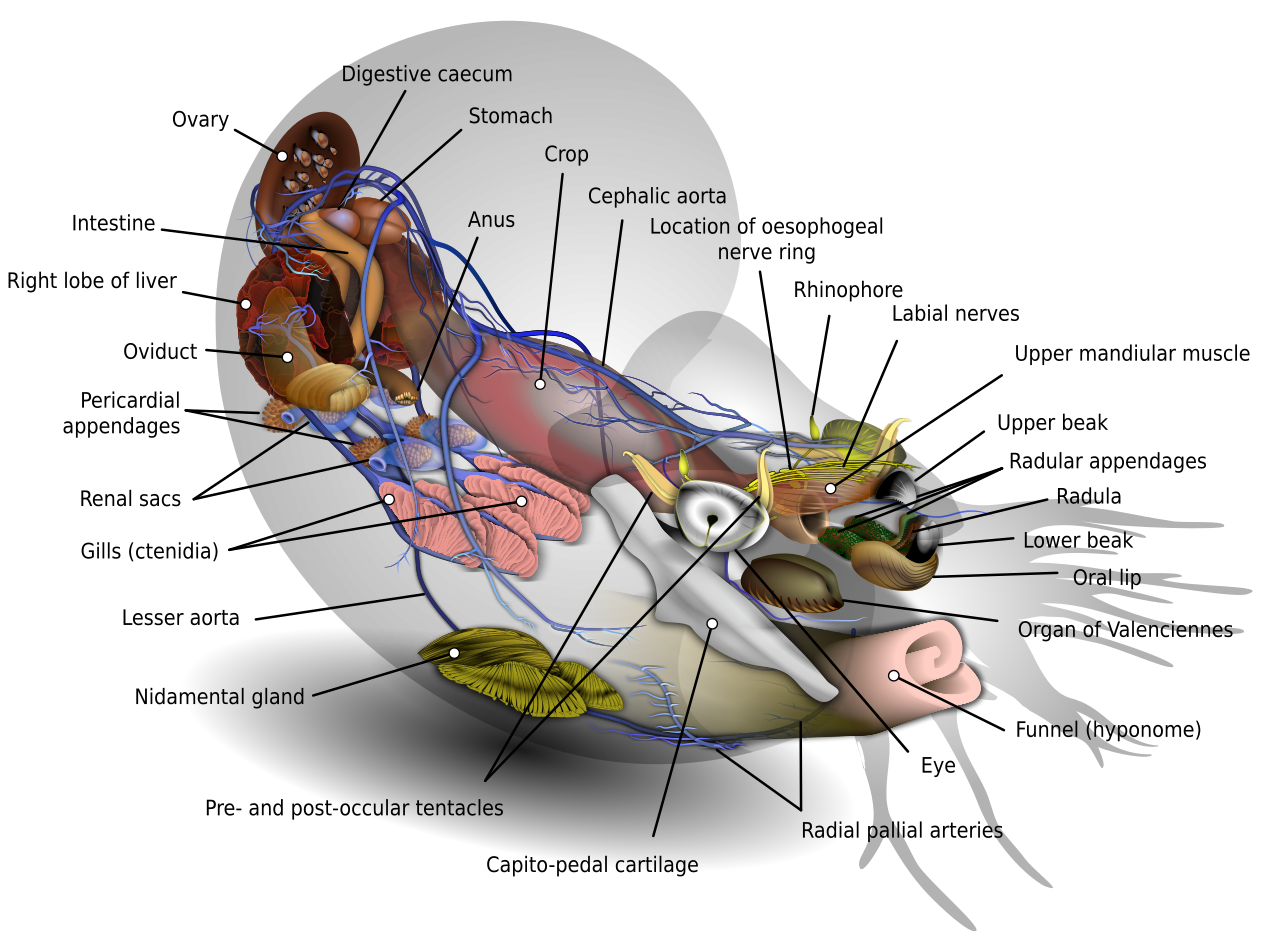
Nautiluses can function normally in the low oxygen environment because their blood contains a protein called haemocyanin that basically enables it to store a lot of oxygen. Additionally, they can use oxygen stored in the chambers of their shell (Figure 2). It is also thought that their method of movement, pushing water from their funnels (Figure 3), a mechanism known as ‘jet propulsion’, is advantageous in low oxygen environments. This makes nautiluses unique.

Jet propulsion swimming is generally less efficient then undulatory swimming (moving like a wave- think fish or snake) because of the size and velocity of the displaced water differs. In jet propulsion swimming, a small mass of water is moved quickly, whereas in undulatory swimming, a large mass of water is moved slowly.
Puzzled by this unique advantage to nautiluses, researchers looked at and measured the wake structure of swimming nautiluses to get insight into the benefits of using jet propulsion in low oxygen environments.
Methods:
Drs. Neil and Askew at the University of Leeds used observation tanks to observe the swimming behavior of nautiluses and visually analyze the wakes made from their movements. The researchers had to incentivize the nautiluses to swim by placing shrimp for them to eat in the observation tank. While the nautiluses swam for the shrimp, their wakes were videotaped so that the wake structure could be quantified. A green laser was used to illuminate the wake structure so that it could be captured on video. The illuminated structure enabled Neil and Askew to isolate the movement of water in only the area that bisected the nautilus’ funnel. Between video-frames they tracked the movement of each particle to reconstruct the wake structure (i.e. the movement of the jetted water).
The researchers used their observations of the animals and fluid to determine the ‘jet thrust’ and ‘whole cycle propulsive efficiency’. Jet thrust is the force propelling the animal and was calculated from the density of seawater, the velocity of the water in the wake, and the cross section of the funnel opening. Whole cycle propulsive efficiency is ratio of useful power to the sum of useful power and wasted power and was calculated from the velocity of the nautilus, the mass of the water being moved, the velocity of the fluid refilling the mantle. (Check out the paper for details of the equations and calculations!)
Results:
The nautiluses swam in two orientations: anterior-first (frontend first) or posterior-first (backend first). Backend-first swimming accounted for 77% of the observations and was 15-20% faster than that frontend-first swimming. Additionally, during backend-first swimming, the funnel opened 4-times its normal diameter compared to 7-times its normal size during frontend-first swimming.
Two, asymmetric wake structures were observed. One was characterized has having an isolated ring structure and the other was characterized as having an elongated structure. Both wake structures had similar whole cycle propulsive efficiency and thrust generation.
For nautiluses swimming backend-first, both the isolated ring and elongated wake structures were observed at all speeds. For nautiluses swimming frontend-first, the isolated ring wake structure was observed at slower speeds and the elongated wake structure was observed at higher speeds, with some overlap in-between. The transition between wake structures is a function of the ratio of funnel length to diameter.
Neil and Askew found that the most efficient swimming orientation was frontend-first swimming with an isolated ring wake structure (slow moving). The second more efficient orientation was the backend-first swimming with an elongated wake structure.
Take away:
All in all, the whole cycle propulsive efficiency of nautiluses agrees with previous observations of jet propulsion animals: efficiency comes at the expense of swimming speed. The nautilus is unique in that at slower speeds its efficiency is up to 30% greater than other propelled animals, such as squid and jellyfish. The bulbous shape of the nautilus does impact the swimming performance at high speeds compared to the slender physique of squid bodies.
Having the capability to move efficiently is important because it translates to a low cost of locomotion, meaning there are few metabolic demands that consume oxygen when in hypoxic environments.
check out this musical video of swimming nautiluses on YouTube!
Hello, welcome to Oceanbites! My name is Annie, I’m a marine research scientist who has been lucky to have had many roles in my neophyte career, including graduate student, laboratory technician, research associate, and adjunct faculty. Research topics I’ve been involved with are paleoceanographic nutrient cycling, lake and marine geochemistry, biological oceanography, and exploration. My favorite job as a scientist is working in the laboratory and the field because I love interacting with my research! Some of my favorite field memories are diving 3000-m in ALVIN in 2014, getting to drive Jason while he was on the seafloor in 2017, and learning how to generate high resolution bathymetric maps during a hydrographic field course in 2019!

