
Katzschmann, Robert K., et al. “Exploration of underwater life with an acoustically controlled soft robotic fish.” (2018). DOI: 10.1126/scirobotics.aar3449
Imagine a fish swimming through a kelp forest. It darts between fronds, weaves around it’s neighbors, and snaps at plankton looking for a snack. These movements are complex and fast paced. Now imagine that you are trying to track and follow this fish in real-time to learn about its behavior. How would you go about doing it?
Ever since scientists have started studying the ocean, they have developed new technology to answer their questions – the same instruments we have on land often will not do the job. Until recently, most oceanographers had to remove a sample from the water in order to do their work. That would involve removing our fish friend from the kelp to study it in the lab. Wonderful discoveries have been made with these techniques, but something is lost when you take a fish out of it’s environment. In the words of John Steinbeck: “The man with his pickled fish has set down one truth and has recorded in his experience many lies. The fish is not that color, that texture, that dead, nor does he smell that way.”
Ideally, a researcher could simply follow their quarry through the water and learn about it’s habits. This is not, however, a trivial task. Divers have difficulty keeping up with nimble creatures and most underwater robots are not equipped for biological studies. Dr. Robert Katzschmann and his team from the Massachusetts Institute of Technology set out to create a new platform, inspired by the creatures they want to study, that could keep up.
The group laid out some ambitious design parameters for their project. They wanted to build a system that could operate without a cord, execute high level commands from a remote diver, be quiet enough to avoid startling sea life, and be capable of executing complex 3-D trajectories. Moreover, Dr. Katzschmann wanted to stuff all this into a package about the size of the fish they wanted to study.

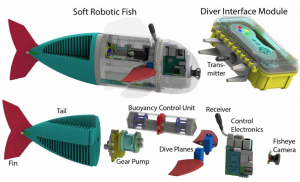
The team’s solution ended up looking like and swimming like a fish (though I doubt it smells like it). The Soft Robotic Fish, or SoFi, has two distinct ways of moving and orienting itself (Fig. 1). The system has two flat plastic panels, called dive planes, that rotate to adjust its depth. That portion of the robot operates much like conventional submarines and autonomous underwater vehicles.
The tail is the fishiest part of the whole system – a custom molded, soft silicone replica of a caudal fin. Dr. Katzschmann designed the tail to mimic the back and forth motion of real fish. The action is hydraulically actuated by alternately shifting fluid from one side of the tail cavity to the other. Swimming horizontally, the robot can beat its tail rapidly enough to swim at about half a body length a second.

To communicate with the SoFi, the team built a custom, hand-held interface. Basically, they created an underwater Nintendo controller (Fig. 1). With it, a diver controlled the SoFi’s speed, depth, and turning angle. In a series of experiments, the team demonstrated that a diver could successfully survey a reef environment and follow organisms with the instrument while keeping a respectable distance (Fig 2 and 3).
The SoFi represents a phenomenal step toward enhancing our subsea research capabilities. The authors of the study already have ideas for what to do with it next. They envision programing the SoFi to run by itself for long periods of time. Once the robot can run autonomously, you could imagine sending out lots of them into a reef at once. The result could be our most detailed study of the reef ever put together.
This sort of underwater technology is critical for understanding the habits in the ocean. As things stand, our sampling is limited in space and time. Instruments like the SoFi help scientists study these complex environments and answer difficult questions about how they function. Without them, we are looking at only a very small slice of the action.
Eric is a PhD student at the Scripps Institution of Oceanography. His research in the Jaffe Laboratory for Underwater Imaging focuses on developing methods to quantitatively label image data coming from the Scripps Plankton Camera System. When not science-ing, Eric can be found surfing, canoeing, or trying to learn how to cook.